《口腔种植机器人临床应用的专家共识(第一版)》解读
《口腔种植机器人临床应用的专家共识(第一版)》解读
随着口腔种植技术的推广与普及,种植修复逐渐成为了牙列缺损和牙列缺失的首选治疗方案[1]。为避免种植手术可能出现的机械和生物学并发症,确保稳定持久的修复效果,国内外学者尝试采用各种数字化方法来确保手术的精度[2-4]。口腔种植机器人(dental implant robot)是用于种植体植入的外科手术机器人,既可接受手术医生指挥,亦可按照预设的程序行动,通过对工作端的精确定位及计算机运动控制,实现种植体的精准植入[5]。近年,手术机器人已在口腔数字化领域取得较大进展,部分研究表明使用机器人可获得理想的手术精度[6-8]。但是,口腔种植机器人的临床应用仍然缺乏诊疗规范,并且其诊疗技术和适用范围也在不断探索更新。
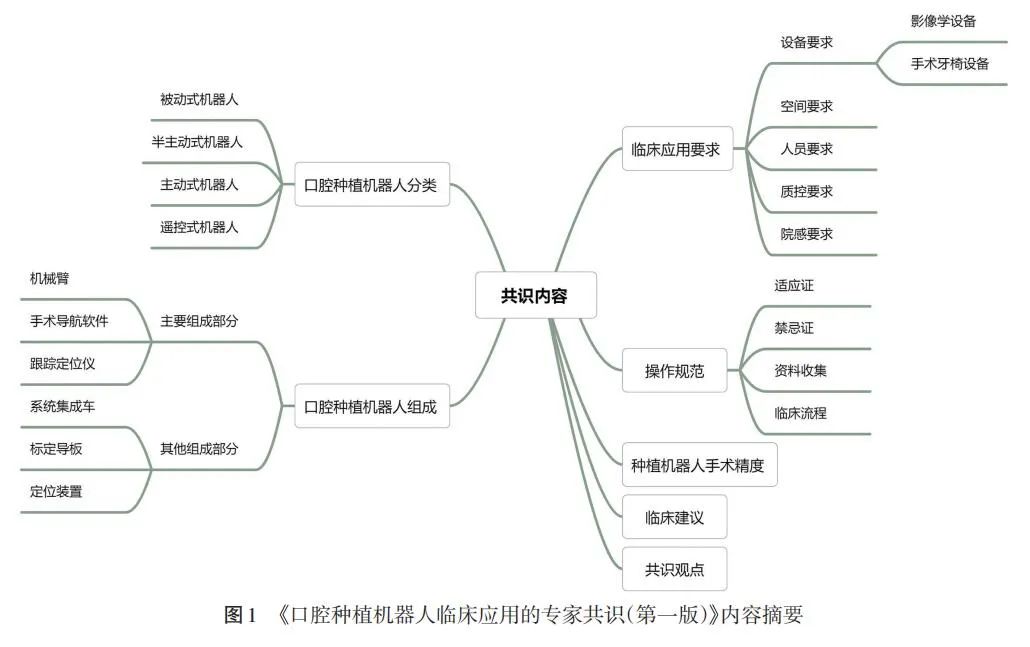
2023年,陈江教授和宿玉成教授共同牵头制定《口腔种植机器人临床应用的专家共识(第一版)》(以下简称《共识》)并发表于《中国口腔种植学杂志》,《共识》召集沈国芳、周延民、满毅、吴轶群、杨国利、张玉峰、汤春波、刘倩、付钢、杜良智、刘峰、高永波、杨醒眉、陈德平、陈卓凡、徐淑兰、王丽萍、张思慧等多位口腔知名院校专家组成共识小组,在参考既往国内外研究论文的基础上,结合各院校专家的实际临床应用经验,内容涵盖口腔种植机器人的相关术语及定义、临床应用要求、操作规范及风险防范等方面(图1),为口腔种植机器人的临床应用提供规范性建议[9]。
本文将详述《共识》的制定流程,并在文献分析基础上结合临床实践,对《共识》的主要内容、重要观点等进行详细解读,以期促进《共识》的临床推广应用。
1 共识制定
《共识》制定时间为2023年3—6月,具体制定流程及时间如下。
1. 1 组建共识专家组、工作组 《共识》邀请来自17家国内口腔知名院校的20名专家组建专家组,均拥有丰富的口腔种植机器人临床应用经验,保证推荐意见的权威性。由福建医科大学附属口腔医院牵头组建工作组,共计24名医生参与《共识》的撰写及制定工作。
1. 2 关键临床问题的确定 自2023年3月开始,由工作组通过问卷调查向临床医生征集口腔种植机器人相关临床问题,并最终由专家组决定保留13个临床问题,包括:口腔种植机器人相关术语及定义、分类、组成、设备要求、空间要求、人员要求、质控要求、院感要求、适应证、禁忌证、临床流程、手术精度、临床建议。
1. 3 证据的检索与收集 围绕以上临床问题,制定检索策略:以“dental implant、dental implantation robot、oral implantology、implantology、implant surgery robot、robotic surgery、robot”为检索词,检索PubMed、Embase、 Cochrane library、中国知网、维普、万方、CBM数据库中的相关研究,包括体外模型实验、动物实验和临床研究,检索时限为建库至2023年1月。筛选符合纳入标准的文献,最终纳入14篇文献(9篇英文文献、5篇中文文献),其中模型实验8篇、临床研究3篇、动物实验2篇、模型+动物实验1篇,提取临床问题对应的证据并进行初稿的撰写。
1. 4 征求意见与评审 于2023年5月将征求意见稿以电子邮件的形式发给20名专家,发放20份,回收20份,回收率为100%。根据专家意见修改完善本共识,并于2023-06-10在“第一次口腔种植机器人共识审定会”上评审通过。
1. 5 形成终稿及发布 根据专家意见及评审会讨论结果,对初稿进行修订和完善,最终于2023-06-30形成终稿并发表于《中国口腔种植学杂志》。
2 共识内容
《共识》旨在为口腔种植机器人的临床应用提出指导性意见,但并非惟一的实践指南,不排除其他共识、意见与建议的合理性。
2. 1 口腔种植机器人的定义及分类 《共识》将口腔种植机器人定义为:用于种植体植入的外科机器人,通过对钻的精确定位及计算机运动控制,实现种植体的精准植入。目前,国内外对于医疗机器人的分类尚未形成统一共识,有学者根据自主水平将医疗机器人分为以下6个等级[10]。Level 0:无自主性(no autonomy),机器人仅能够响应和遵循医生的命令;Level 1:机器人辅助式(robot assistance),机器人在任务期间提供一些机械引导或辅助,而医生对系统具有持续性的控制;Level 2:任务自主式(task autonomy),机器人自主执行由医生发起的特定任务,与Level 1的不同之处在于用户对系统的控制是离散而非持续的;Level 3:条件自主式(conditional autonomy),由机器人系统自主生成任务方案,但依赖医生从不同方案中进行选择和批准;Level 4:高度自主式(high autonomy),机器人在医生的监督下做出医疗决策和手术;Level 5:全自主式(full autonomy),完全自主,不需要人工,相当于一位“机器人外科医生”,可自主进行整个手术。
另有学者根据医疗机器人的操作方式,将其分为被动式(passive)、遥控式(teleoperated)、半主动式(semi-active)、共操控式(comanipulated)及主动式(active)5类[11]。
结合现如今的口腔种植机器人发展情况,并参考上述分类,《共识》将口腔种植机器人简要分类为:被动式机器人、半主动式机器人、主动式机器人、遥控式机器人,以利于进行区分。
2. 2 口腔种植机器人的组成 口腔种植机器人主要由机械臂、光学跟踪定位仪、手术导航软件组成[12],以上3个组成件常被称为机器人的“手、眼、脑”,分别起到手术操作、跟踪定位和主导控制的功能。此外,还有系统集成车、标定导板、定位装置、操作踏板、力反馈感受器等重要构成硬件。
2. 3 口腔种植机器人的临床应用要求 《共识》首次提出了临床中口腔种植机器人在设备、空间、人员、质控、院感等方面的具体要求和建议,使得该共识在我国医疗背景下更具参考意义,为临床医生提供参考。
《共识》提到,影像学设备需要有较大的扫描视野范围,这是由于在患者口内粘接标定导板后,需要同时扫描到标定导板中具有阻射性的锆珠及患者术区牙列,以确保机器人注册的精准性。此外,文中还简述了机器人临床应用的人员要求,一般情况下在使用机器人时至少需要3位人员(主刀医生、医生助手及机器人操作员)的密切配合,主刀医生主要负责术中情况的决策、机械臂的牵引、钻针的更换和使用脚踏板对机器人进行启停等,医生助手主要负责暴露术区、吸除冷却水和观察患者口内情况,机器人操作员负责机器人主控屏幕的操作、视觉定位系统的调整以及应对机器人可能出现的各类突发情况。因此,为保证手术的安全性和流畅性,口腔种植机器人手术中的所有人员都应接受完整的相关培训,并且具有一定的临床操作经验。
2. 4 口腔种植机器人的操作规范 操作规范中详细描述了口腔种植机器人的适应证、禁忌证、资料收集和临床流程,不同的手术机器人具有不同的操作特点和资料要求,其临床关键在于术前准确的注册和配准,这是确保机器人在术中精准识别追踪与定位的前提。
2. 5 口腔种植机器人的手术精度 为系统评价机器人系统辅助口腔种植手术的精确性,共识工作组通过检索、筛选,纳入14篇体内外种植机器人种植相关研究,总结出已报道的机器人种植手术平均种植体颈部偏差、种植体尖部偏差和角度偏差分别为0.72 mm(95%CI:0.63 ~ 0.81,I2 = 93.2%)、0.90 mm(95%CI:0.76 ~ 1.03,I2 = 95.7%)、1.57°(95%CI:1.26 ~ 1.88,I2 = 98.1%)[13]。其在各类具体临床条件下应用的手术精确性,仍需要更多大样本、高质量、多中心的临床研究进行补充和证实。
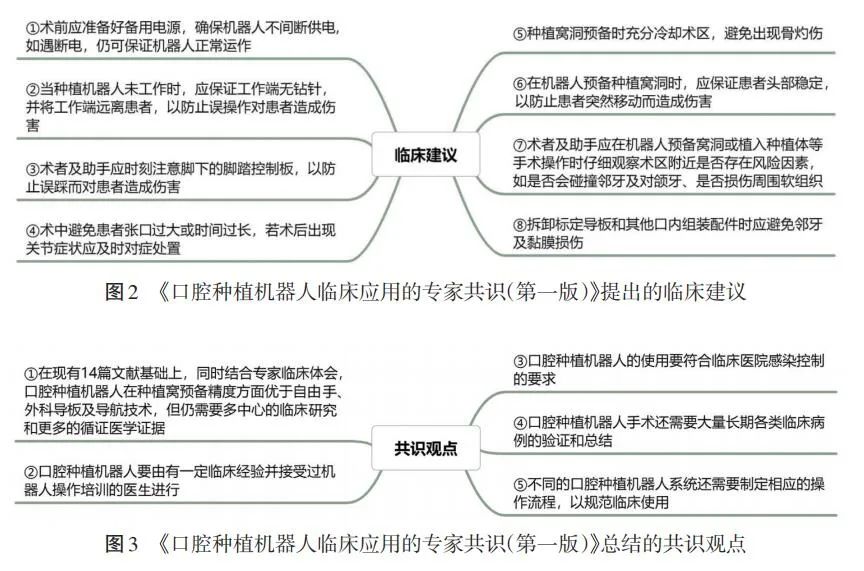
2. 6 口腔种植机器人的临床建议及共识观点 《共识》结合多位专家的临床经验及相关研究,经过共识会上详细讨论,最终总结出8点临床建议(图2)和5个共识观点(图3),以期为国内广大临床医生应用口腔种植机器人提供参考性指导意见。
3 结语
口腔种植机器人作为近年来飞速发展的新技术之一,尚未积累足量且高质量的临床证据,也未制订相关临床应用指南和标准,仍处于探索和完善阶段。《共识》是首篇根据我国国情和现有国内外口腔种植机器人发展水平撰写的专家共识,为口腔种植机器人的临床应用提供了明确的研究依据和参考意见,有利于促进口腔医学领域数字化技术的创新和发展。
引用本文:林宇轩,张思慧,陈江. 《口腔种植机器人临床应用的专家共识(第一版)》解读[J]. 中国实用口腔科杂志,2024,17(1):33-36. DOI:10.19538/j.kq.2024.01.005
作者简介
陈江,福建医科大学附属口腔医院教授、主任医师、博士研究生导师。国务院政府特殊津贴专家、全国优秀科技工作者、全国“白求恩式好医生”。兼任中华口腔医学会常务理事、口腔美学专业委员会主任委员、口腔种植专业委员会候任主任委员,国家自然科学基金评审专家,Journal of Oral Maxillofacial Implant中文版主编,Clinical Oral Implants Research审稿专家,《中华口腔医学杂志》编委,《口腔医学研究》杂志副主编。全国住院医师规范化培训统编教材《口腔修复学》副主编,全国口腔专业本科统编教材《口腔种植学》编委,国际牙医师学院院士。福建省百千万人才工程人选、福建医科大学学科带头人,福建省医师协会副会长、福建省口腔医学会会长。
作者姓名:林宇轩,张思慧,陈 江
作者单位:福建医科大学附属口腔医院种植科,福建 福州350001
通信作者:陈江,电子信箱:dentistjiang@sina.com

 尼古拉斯・凯奇整
尼古拉斯・凯奇整 梁静茹大方承认拔
梁静茹大方承认拔 金泰熙牙齿矫正前
金泰熙牙齿矫正前